|
Contact
- MAIL:
Escuela Superior Informática
Paseo de la universidad nº4
13071 Ciudad Real
SPAIN
- EMAIL: AndresS.Vazquez@uclm.es
- TLF: +34 926 295 300 ext 3749 (Laboratorio ISA)
- FAX:+34 926 295 400
Current
Research Projects

|
REVI3D
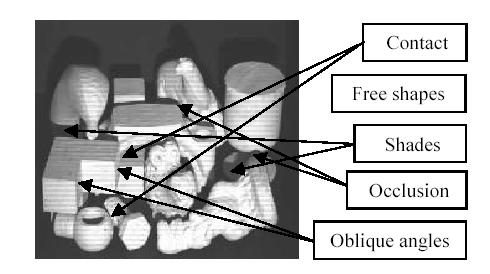
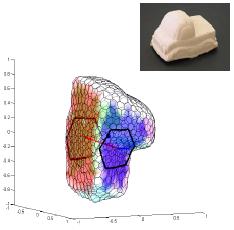
This project copes with the management of complex 3D scenes sensed by range finder sensors. Different free-form objects located at arbitrary poses in the scene, where occlusion phenomena can appear, form this kind of scenes. Scene is sensed from a single point of view and therefore only partial information of it is available. The project is an extension of a previous one carried out by the same research team. Previous works have been dedicated to deal with isolated objects, being this project the natural extension of these research activities.
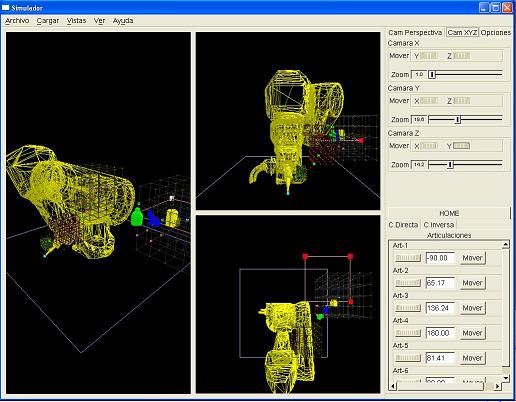
The proposed objectives are arranged in several stages. Firstly, new 3D segmentation techniques will be developed in order to separate the objects that compose the scene. Then new object recognition and object localization techniques must be developed, with the purpose of reconstructing the scene. Methods based on object models extracted from partial range data views will be used in this case. A technological application will be built on top of the obtained research results. A virtual environment allowing the scene reconstruction and the inclusion of a virtual manipulator will be developed. Different grasping strategies will be simulated in this environment, allowing the selection of the most adequate one. Finally, a platform including a real manipulator and a range sensor will be constructed to test the planned grasping strategies. |
Past
Research Projects

|
SIPMAN
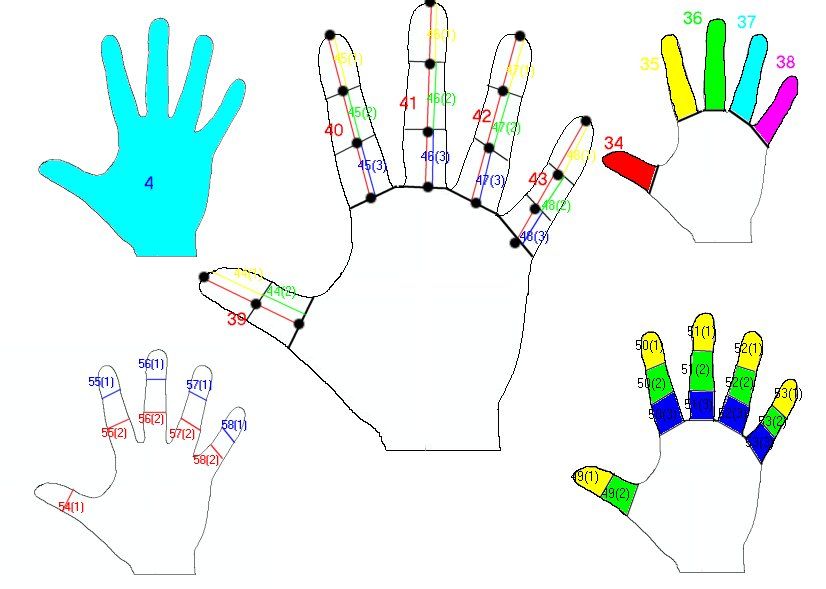
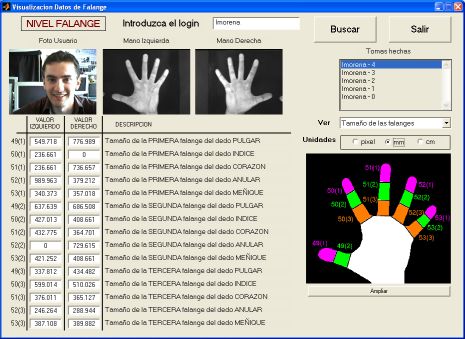
This project is framed in the general approach of computer vision, specifically in biometric methods for personal identification. In this environment, the specific objective of the project is focused on defining robust hand features through artificial intelligence techniques and image processing. The goal is to establish sure personal codes when both hands are used. Therefore several stereo algorithms could be reviewed in this false stereo problem. Up to now only one hand has been used in personal identification problems, so scientist objective of this project involves a meaningful advance with regard to other techniques.
In order to obtain this objective, a personal-identification device based on computer vision must be developed. For that, we will establish two sequential steps. First, an extensive study and test will be performed in laboratory using a experimental setup. In this phase, the identification procedure must be refined before carry out the next phase. In the second step, a portable device will be built in order to accomplish a wide test of the system outside. Finally, results and conclusion will be performed. This task will involve a technological contribution of the project.
|
|
TAP 98-0240
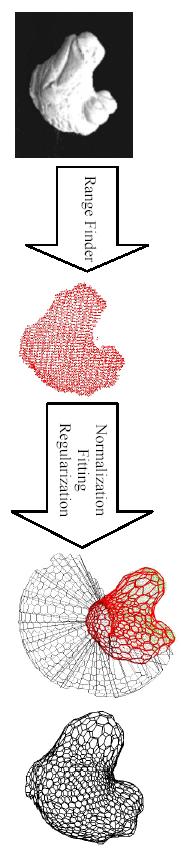
This project is framed in the general approach of computer vision, specifically in geometric modeling from tridimensional information. The scientific objective of the project is focused on geometric dynamic modeling when tridimensional data come from structured light colour projection techniques. Therefore, deformable objects or changing objects will be considered.
In order to obtain this objective, a new and fast technique for recovering tridimentional information based on structured light colour must be designed. Deformable modeling techniques will be studied and a specific model will be developed according to the data come from the sensor. Moreover, a simulation and visualization software tool will be developed in this project to carry out a whole study of the problem.
Up to now geometric modeling for static shapes using both gray range finders and stereovision techniques have been used in our research. Therefore the objective of this project involve a meaningful advance with regard to static modeling techniques.
From a technological point of view and as application, a link of the 3D sensing system and a robot manipulator will be considered. The general idea is that the robot manipulator should be able to make interactions in the dynamic scene. In this sense, a set of increasing difficult actions will be established. |
Teaching
2007-2008 |
Industrial Robotics |
School of Industrial Engineering
Ciudad-Real, Spain |
2007-2008 |
Control Theory |
Higher Polytechnic University College Albacete, Spain |
2006-2007 |
Control Theory |
Higher Polytechnic University College Albacete, Spain |
2005-2006 |
Control Theory |
Higher Polytechnic University College Albacete, Spain |
2005-2006 |
Introduction to Computing |
School of Industrial Engineering
Ciudad-Real, Spain |
2004-2005 |
Control Theory |
Higher Polytechnic University College Albacete, Spain |
2004-2005 |
Introduction to Computing |
School of Industrial Engineering
Ciudad-Real, Spain |
2003-2004 |
Control Theory |
Higher Polytechnic University College Albacete, Spain |
2003-2004 |
Introduction to Computing |
School of Industrial Engineering
Ciudad-Real, Spain |
Publications
Refereed Journal
Authors: M. Adán, A. Adán, A.S. Vázquez
Title: Clustering Using WCC Models
Pages, from: 921 to: 929 Date: 2004
Journal: Lecture Notes on Computer Science
Authors: P. Merchán, A.S. Vázquez, A. Adán, S. Salamanca
Title: 3D scene analysis from a single range image through occlusion graphs
Accepted, to be published in 2008
Journal: Pattern Recognition Letters
Refereed Conference
Authors: A.Adán, A.Vázquez,G.Bueno. F.Molina
Title: A Hands Bimetric Prototype Based on their Natural Layout Conference: THIRD IASTED INTERNACIONAL CONFERENCE OF VISUALIZATION, IMAGING AND IMAGE PROCESING
ISBN: 0-88986-382-2. Editor: M.H. Hamza
Location : Benalmádena, Malaga Spain |
Date: 2003 |
Authors: A.Vázquez,A.Adan C.Cerrada, S. Salamanca
Title: Control de una plataforma de posicionamiento en aplicaciones de visión
Conference: Jornadas Automática
ISBN: 84-931846-7-6. 2003
Location : León, Spain |
Date: 2003 |
Authors: A.Adán, A.Vázquez,G.Bueno. F.Molina
Title: Prototípo Biométrico de manos basado en su disposición natural
Conference: Jornadas Automática
ISBN: 84-931846-7-6. 2003
Location : León, Spain |
Date: 2003 |
Authors: M. Adán, A. Adán, A.S. Vázquez
Title: Clustering Using WCC Models
Conference: Joint IAPR International Workshops On Syntactical and Structural Pattern Recognition (SSPR 2004) and Statistical Pattern Recognition (SPR'04).
Location : Lisboa, Portugal |
Fecha: 2004 |
Authors: A.Adán, M.Adán, A.Vázquez,G.Bueno.
Title: Método de Verificación Personal Mediante Comparaciones Cruzadas de Ambas Manos
Conference: Jornadas Automática
ISBN: 84-688-7460-4
Location: Ciudad Real, Spain |
Fecha: 2004 |
Authors: A. Adán, A.S. Vázquez, M. Adán, P. Merchán, S. Salamanca, C. Cerrada.
Title: Object Layout Graphs for 3D Complex Scenes
Conference: IEEE International Conference of Image Processing.
ISBN: 0-7803-9134-9 2005
Location: Genova. Italia |
Date : 2005 |
Authors: M. Adán, A. Adán, R. Torres. A.S. Vázquez, G. Bueno
Title: Personal Authentication Based on Hands Natural Layout
Conference: IAPR Conference on Machine Vision Applications.
ISBN: 4-7856-3153-8
Location : Tsukuba Science City, Japan |
Date: 2005 |
Authors: A. Adán, F. Molina, A.S. Vázquez,
Title: 3D Feature Tracking Using a Dynamic Structured Light System
Conference: Canadian Conference on Computer and Robot Vision .
ISBN: 0-7695-2319-6
Location : Victoria, CANADA |
Date: 2005 |
Authors: A. Adán, A.S. Vázquez, F. Molina
Title: Grasping Solutions through MWS Models
Conference: International Conference on Advanced Robotics (ICAR)
ISBN: 0-7803-9178-0
Location: Seattle (Washington). EEUU |
Date: 2005 |
|
|