




TESIS DOCTORAL (4)TELEOPERACIÓN SUPERVISADASe han aportado las siguientes soluciones a los requerimientos para un sistema de teleoperación supervisada:
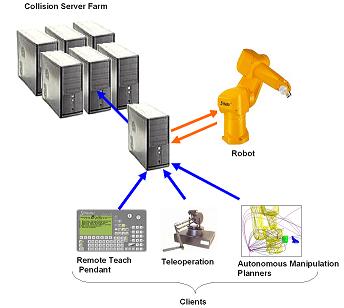
La arquitectura diseñada, junto con las técnicas y tecnologías utilizadas, han sido validadas mediante tests experimentales en una plataforma robótica. El sistema de teleoperación supervisada ha sido también validado con la utilización de un sistema háptico de 6 grados de libertad incluido en la celda de robótica.
|
|